
RADARTECHNOLOGIE
Techniktrend Radar
1. Radartechnik Tutorial
Radarsensorik ist eine Schlüsseltechnologie und entwickelt sich rasant weiter. In vielen Bereichen profitieren wir von innovativen Sensorlösungen. Doch was ist Radar eigentlich und wie funktioniert die Technik?
Auf dieser Seite möchten wir Ihnen ein Einblick in die Welt der Radarsensorik bieten, ihnen die komplexe Technik näher bringen und ein Teil unserer Expertise zu Verfügung stellen.
1.1 Was ist Radar?
RADAR steht für „Radio Detection and Ranging“ und ist ein aktives Sende-& Empfangsverfahren im Mikrowellen-GHz-Bereich. Die Radarsensorik dient der berührungslosen Detektion, dem Tracking und der Lokalisierung eines oder mehrerer Objekte mittels elektromagnetischer Wellen.
1.2 Wie funktioniert Radardetektion?
Die Radarantenne sendet ein Signal in Form von Radarwellen aus, welche sich in Lichtgeschwindigkeit bewegen und von Menschen nicht wahrnehmbar sind. Treffen die Wellen auf Objekte, verändert sich das Signal und wird zurück zum Sensor reflektiert – ähnlich wie bei einem Echo. Das an der Antenne ankommende Signal enthält Informationen über das detektierte Objekt. Im Anschluss wird das empfangene Signal aufbereitet, um mit Hilfe der erhobenen Daten das Objekt zu identifizieren und lokalisieren. In einem zweiten Schritt ist es möglich, einen Impuls auszugeben um eine Reaktion auszulösen.
1.3 Welche Eigenschaften hat die Technik?
Berührungslos: Die Radardetektion erfolgt aufgrund des Messprinzips völlig berührungslos, ohne direkten Kontakt zum detektierenden Material/Objekt. Selbst in weiter Entfernung misst & detektiert Radar zuverlässig.
Anonym: Für industrielle und Automotive Anwendungen sind nicht bildgebende Radarsensoren im Einsatz. Sie bilden lediglich eine Art Punktwolke, die einen groben Aufschluss auf Objektkonturen & die Infrastruktur des Umfelds gibt. Personen sind nicht, wie bei einer Kamera, identifizierbar.
Umfangreiche Daten: Radarsensoren erkennen Bewegungen & stationäre Objekte. Die durch die Reflexion empfangenen Daten liefern nach der Signalverarbeitung eine Reihe an Informationen über erfasste Objekte, Fahrzeuge, Tiere oder Personen. Dabei stehen Daten wie die Bewegungsrichtung, Geschwindigkeit, Entfernung & Winkellage im Verhältnis zum Sensor zu Verfügung.
Mehrdimensionale Detektion: Je nach Modulation erheben Radare umfangreiche Daten über ihre Umgebung. Auf diese Weise ist es möglich, dass über Sensoren auch eine dreidimensionale Umgebungserfassung wie mit dem menschlichen Auge möglich ist.
Große Reichweitenvariabilität: Radarwellen breiten sich frei im Raum oder in der Luft aus. Je nach technischer Entwicklung des Sensors & Nutzungszweck des Sensors können bei Bedarf extreme Reichweiten erzielt werden. Für kommerzielle Anwendungen variiert der Erfassungsbereich in der Regel von 1cm bis zu einige 100m.
Materialdurchdringung: Die elektromagnetischen Wellen der Radarsensoren durchdringen verschiedene Materialien. Insbesondere Kunststoffe eignen sich sehr gut als Abdeckung oder der Gestaltung eines Radoms, eine kuppelförmige Schutzhülle für die Antenne. Auf diese Weise sind die Sensoren unauffällig in ein Produktdesign integrierbar.



1.4 Welche Vorteile bietet Radartechnik?
Abgeleitet aus den Radareigenschaften bietet die Technologie einige Vorzüge für Ihre spätere Anwendung.
Denn Radar
- ist wetterunabhängig
- toleriert extreme Hitze- und Kälte
- funktioniert trotz Überbelichtung und schlechten Lichtverhältnissen
- arbeitet auch in der Dunkelheit
- ist wartungsfrei
- bietet große Funktionalität:
z. B. Messung von Abstand & Geschwindigkeit, Tracking, Lokalisierung von Objekten, Ermittlung von ETA, Objektklassifikation, Personenzählung - ist für Indoor & Outdoor geeignet
- ist für viele Anwendungen einsetzbar
InnoSenTs Radarprodukte bieten zudem ein kompaktes Design und eine leichte Integration.
1.5 Was unterscheidet Radar von anderen Sensortechnologien?
Die verschiedenen Messverfahren haben unterschiedliche Stärken und Schwächen. Je nach Anwendung gilt es abzuwägen, welche Sensortechnik den größten Mehrwert bietet und die jeweiligen Aufgaben und Herausforderungen löst. Eine grobe Übersicht bietet folgende Tabelle:
| PERFORMANCE LEVEL | ||||
|---|---|---|---|---|
| EIGENSCHAFTEN | RADAR | INFRAROT | ULTRASCHALL | LASER |
| Anwendungsflexibilität | TOP | SCHLECHT | SCHLECHT | SCHLECHT |
| Unempfindlich gegenüber Feuchtigkeit, Dreck & Temperatur | TOP | SCHLECHT | SCHLECHT | SCHLECHT |
| Geschwindigkeitsmessung | TOP | SCHLECHT | GUT | TOP |
| Genauigkeitsempfindlichkeit | TOP | SCHLECHT | TOP | TOP |
| Auflösung (Trennfähigkeit) | TOP | SCHLECHT | TOP | TOP |
| Ermittlung Bewegungsrichtung | TOP | GUT | GUT | SCHLECHT |
| Entfernungsmessung | TOP | GUT | SCHLECHT | TOP |
| Durchstrahlen von Matierialen | TOP | SCHLECHT | SCHLECHT | SCHLECHT |
| Produktgröße | TOP | TOP | TOP | SCHLECHT |
| Kosten | GUT | TOP | TOP | SCHLECHT |
2. Parameter der Radartechnik
Radar ist nicht gleich Radar. Die Sensoren unterscheiden sich häufig in Funktionalität und Eigenschaften. Dies liegt daran, dass je nach Anwendung andere Konfigurationen nötig sind, um die gewünschte Messung durchzuführen. Die Unterschiede der verschiedenen Radartypen sind durch zwei grundlegende Parameter definiert: Das genutzte Frequenzband und die Modulation.
Das Messverfahren Radar sendet und empfängt elektromagnetischen Wellen in einem bestimmten Frequenzbereich. Das Spektrum der Radarsensorik enthält aufgrund der unterschiedlichen physikalischen Eigenschaften verschiedene Abstufungen. Dabei sind bestimmte Frequenzabschnitte mit Buchstaben betitelt, um das Frequenzband zu benennen. Diese Bezeichnung ist unter anderem durch Institutionen wie die IEEE und der Nato definiert und international anerkannt.
Generell ist die technische Kommunikation mittels Radarwellen durch Landesbehörden und internationalen Zusammenschlüssen reguliert. Diese legen Leistungsgrenzwerte und die Zulassung der Frequenzbänder fest.
Das typische Spektrum für kommerzielle Radaranwendungen liegt zwischen 10 und 120 GHz. Je nach Anwendung nutzen Entwickler wegen der jeweiligen technischen Eigenschaften andere Betriebsbereiche. Denn die Wahl der Sende- und Empfangsfrequenz wirkt sich auch auf die erzielbare Performance und Eigenschaften des Radars aus.
Beispielsweise durchdringen 10 GHz Radare sogar Wände, während Sensoren im 60 GHz oder 77 GHz Bereich aufgrund der höheren erlaubten Bandbreite über ein höheres Auflösungsvermögen verfügen. Ein Vorteil von 24 GHz Sensoren, ist die weltweite Zulassungsfähigkeit.
Häufig ist der Radartyp auch über die Angabe des genutzten Radarverfahrens definiert. Dabei wird das Radarsignal durch die gezielte Modulation der Sendefrequenz beeinflusst. Die gängigen Radartypen sind CW, FSK und FMCW.
CW steht für „continous wave“. Bei diesem Verfahren sendet und empfängt der Sensor das Signal gleichzeitig und kontinuierlich (feste Sendefrequenz). Dieser Typ ist auch als unmoduliertes Dauerstrichradar bekannt.
FSK bedeutet „Frequency Shift Keying“. Hierbei handelt es sich um eine Sondervariante des FMCW-Radars, das sprunghaft zwischen zwei Frequenzen wechselt.
FMCW ist die Abkürzung für „Frequency-Modulated Continous Wave“. Das frequenzmoduliertes Dauerstrichradar nutzt keine feste Sendefrequenz, sondern eine zeitlich abhängige Modulation der Frequenz (stetig, zyklisch und kurvenförmig), die auch als Chirp bezeichnet wird.
Wann benötige ich welchen Radartyp? Dies ist abhängig von dem zu detektierenden Objekt und der benötigten Objektinformation.
Eine grobe Übersicht für eine erste Vorauswahl gibt Ihnen die folgende Tabelle:
3. Möglichkeiten der Radartechnik
Mittels Radardetektion lässt sich die Präsenz oder die Bewegung von Objekten oder Lebewesen erfassen. Je nach Modulation und Antennenkonfiguration ist es möglich, folgende Informationen abzuleiten:
GESCHWINDIGKEIT
exakte Daten über die Geschwindigkeit eines ObjektesENTFERNUNG
Daten zur Entfernung eines oder mehrerer ObjekteBEWEGUNGSRICHTUNG
Bewegungsrichtung eines ObjektesWINKEL
Bestimmung des Einfallswinkels und Auflösung über die Winkelauflösung
Mit Hilfe der analogen und digitalen Signalauswertung sind anhand dieser Basiswerte zudem weitere Informationen ableitbar. Beispielsweise lassen sich durch intelligente Algorithmen Radar-Cluster erstellen, die dann eine Bewegungshistorie darstellen. Zudem ist es möglich diese Objekte zu klassifizieren. Bei entsprechender Signalauswertung erkennt das Radar anhand der Rohdaten wie dem Radarquerschnitt (RCS), ob es sich um eine Person oder ein Fahrzeug handelt. Sind Referenzwerte vorhanden, lassen sich zudem Grenzwerte, Füllmengen oder Ankunftszeiten ermitteln.
Häufig kommt es hier in Verbindung mit der Radarauflösung zu Missverständnissen. Während die Auflösung das Trennungsvermögen eines Radars beschreibt, handelt es sich bei der Genauigkeit um den kleinsten messbaren Unterschied in der Messgröße. So sagt die Genauigkeit aus, wie präzise die Parameter wie Geschwindigkeit, Distanz oder Winkelablage gemessen werden. Dies erfolgt unter Berücksichtigung einer plus/minus Toleranz, die als Abweichungsrate angegeben wird.
Die Messgenauigkeit ist abhängig von der Betrachtungszeit, in der die Messung erfolgt. Je länger die Objektdetektion, desto mehr Messwerte empfängt das Radar. Stehen mehr Daten für die Auswertung zu Verfügung, umso aussagekräftiger und zuverlässiger ist diese.
Für die Praxis müssen Entwickler meist einen Kompromiss zwischen Detektionszeit und Genauigkeit treffen. Denn wenn möglichst schnell Informationen abrufbar sein sollen, muss die Messdauer verkürzt werden.
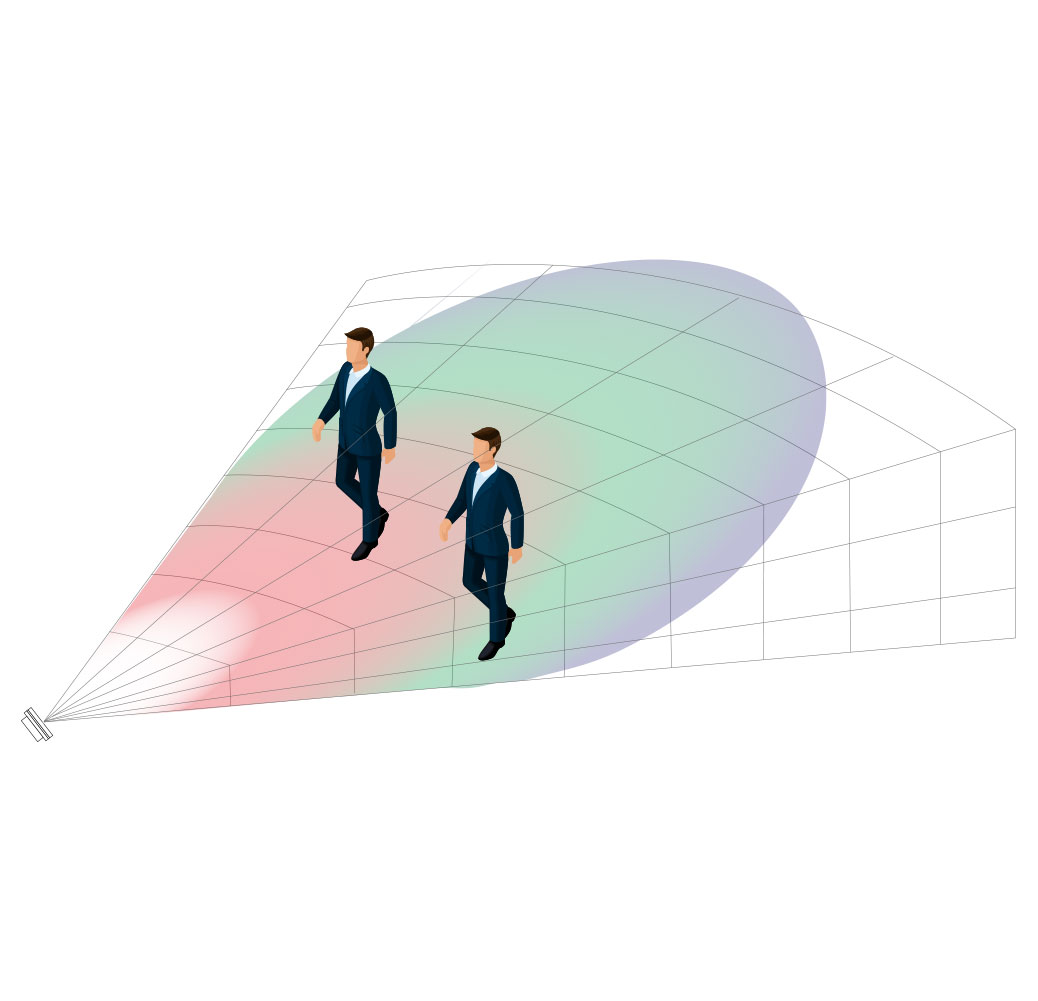
Mit Hilfe des Antennendesigns definieren die Radarentwickler den Erfassungsbereich des Sensors. Durch die unterschiedliche Anordnung der Antenne richten sie die Strahlung der Radarwellen aus. Das Antennendiagramm zeigt, in welche Richtung die Antenne die meiste Energie ausstrahlt. Mit Hilfe von Richtantennen gestalten die Entwickler dessen Form und Reichweite, so dass möglichst viel Antennengewinn entsteht. Auf diese Weise wird die Energie auf den gewünschten Blickwinkel fokussiert und eine Energieverschwendung sowie Nebenkeulen reduziert.
Der Detektionsbereich kann schmal gebündelt und lang gezogen, aber auch breit gefächert sein. Das Design richtet sich dabei nach der späteren Anwendung. Ein neuartiges Verfahren ist dabei die fortschrittliche MIMO-Technik, die mehrere Sende- und Empfangsantennen miteinander kombiniert.
Radarwellen breiten sich in der Luft frei im Raum aus. Treffen sie auf ein Objekt, verändert sich das Signal aufgrund des Einflusses der Beschaffenheit des Objekts. Die Materialien wirken sich dabei unterschiedlich auf die Radarwellen aus. Sie werden ganz oder teilweise absorbiert oder reflektiert. Ebenso durchdringen die Radarstrahlen verschiedene Substanzen.
Für 24 GHz Radare lassen sich allgemein folgende Aussagen treffen:
| MATERIAL | ABSORPTION | REFLEXION | DURCHSTRAHLUNG |
|---|---|---|---|
| Metall | Keine | Bei geradem Auftretten: Vollständig; Bei schrägem Einfall: Brechung und Teilreflexion möglich | Praktisch unmöglich, nur Millimeterbruchteile dringen in die Oberfläche (Skin-Effekt) |
| Holz (abhängig von der Feuchtigkeit) | Mittel bis Stark | Gering | Gering |
| Wasser | Sehr hoch | Je nach Einfallswinkel ist eine Teil oder Totalreflexion möglich | Keine, aufgrund der Absorption |
| Schäume (z.B. Styropor, Roofmate) | Gering | Gering | Sehr gut |
| Kunststoffe | Gering bis Hoch (abhängig von Dicke und Art des Materials) | Gering bis Hoch (abhängig von Dicke und Art des Materials sowie Entfernung) | Gering bis Hoch (abhängig von Dicke und Art des Materials sowie Entfernung) |
Die Reichweiten von Radarprodukten sind sehr unterschiedlich. Im industriellen, kommerziellen und automotiven Sektor messen sie von wenigen Zentimetern bis mehrere hundert oder tausend Meter. Wie weit ein Radar messen kann, hängt von verschiedenen Faktoren ab.
Generell gilt, je weiter ein Objekt entfernt ist, desto schwieriger ist es zu detektieren. Auch Objekte mit geringem RCS (radar cross section, Radarquerschnitt) sind in der Ferne schlechter detektierbar. Denn das Signal muss einen langen Kommunikationsweg hin und zurücklegen. Hierbei entstehen Signalverluste, beispielsweise aufgrund der Umwelteinflüsse oder Störfaktoren. Je höher die Sende- und Empfangsleistung, desto besser ist das auszuwertende Signal nach einem langen Reflektionsweg.
Die Reichweite des Radars ist grundsätzlich durch das jeweilige gewählte Frequenzband begrenzt. Es bestimmt die verfügbare Wellenlänge sowie deren Frequenz. Auch die Sendeleistung ist durch Vorschriften limitiert. Die Empfangsleistung ist durch den Antennengewinn und das Antennendesign definiert. Mit der Gestaltung der Antennenrichtwirkung (z. B. die starke Bündelung) und der Aufintegration mehrerer Antennen erzielen Entwickler eine hohe Empfindlichkeit. Dies hat jedoch ein größeres Rauschen zu Folge, das mit weiterem technischem Aufwand zu unterdrücken ist.
Bei der Radarentwicklung muss für die jeweilige Anwendung ein optimales Verhältnis zwischen Reichweite, Erfassungsbereich und Auflösung erzielt und mit technischem Aufwand unerwünschte Nebeneffekte minimiert werden.
Ein fortschrittliches Feature von Radarprodukten ist die Objektklassifikation. Hierfür müssen umfangreiche Informationen über ein Objekt zu Verfügung stehen. Dies ist durch eine hohe Auflösung erzielbar, da so mehr Messpunkte eines Objekts erfasst werden. Die Klassifizierung erfolgt dann über intelligente Algorithmen bei der Signalverarbeitung. Beispielsweise im Verkehrsbereich ist es möglich anhand der Fahrzeuglänge (Ausdehnung eines Objekts im Raum) das Objekt einer bestimmten Fahrzeugklasse zu zuordnen. Aber auch Messwerte wie der RCS, Geschwindigkeit oder Informationen über Bewegungsmuster tragen dazu bei, Objekte einem bestimmten Typ zuzuweisen. Eine Person hat beispielsweise einen anderen RCS-Wert als ein Fahrzeug. Mit Hilfe der vorhandenen Daten und entsprechender Programmierung können so Aussagen über die Objektzugehörigkeit zu beispielsweise den Klassen „Person, Fahrzeug, Tier oder Sonstiges“ getroffen werden.
3.7 Auflösungsvermögen
Die Radarauflösung ist die Fähigkeit von Radarsensoren und -systemen, Ziele voneinander zu trennen (Trennbarkeit). Die folgende Übersicht zeigt die verschiedenen Radarauflösungen.
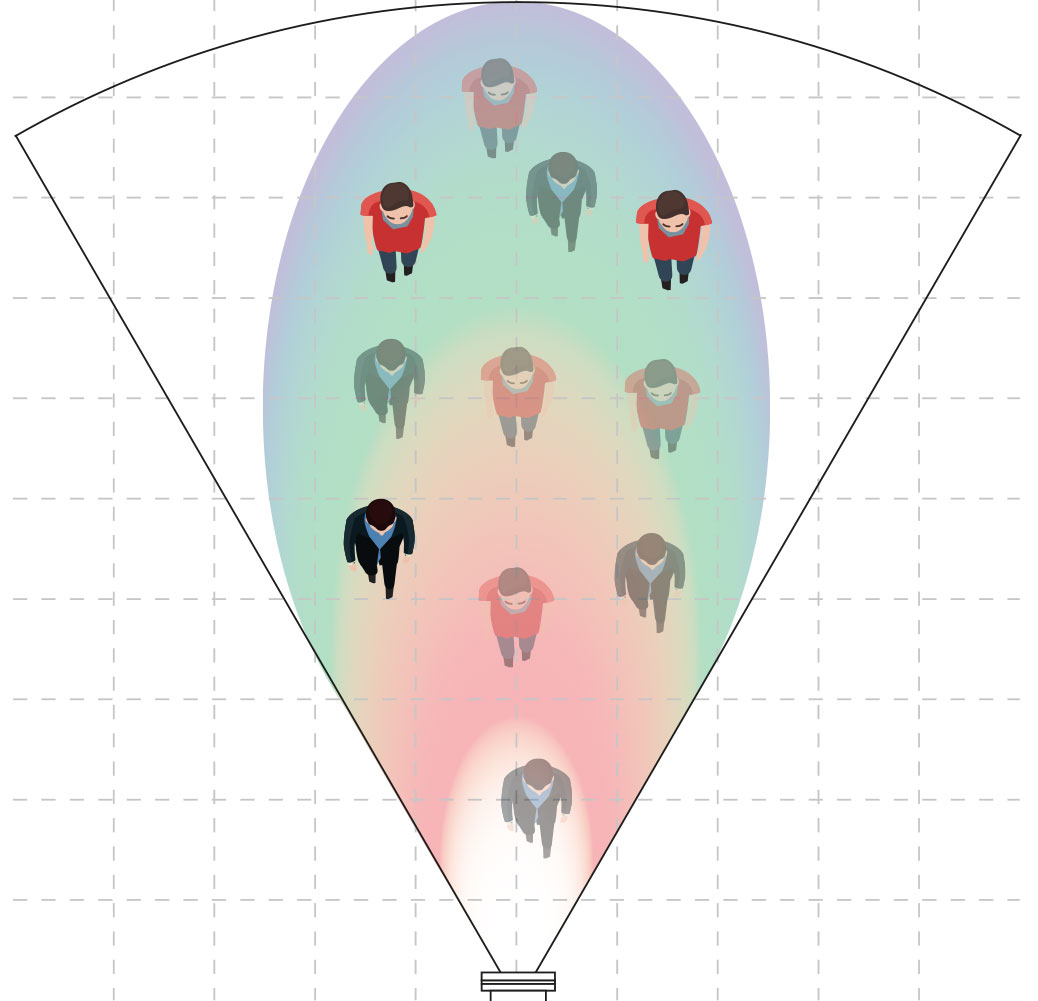
1D-RADAR (CW)
Trennung von Objekten durch
- Geschwindigkeit
Objekte mit der gleichen Geschwindigkeit können nicht getrennt werden (keine Lokalisierung möglich).
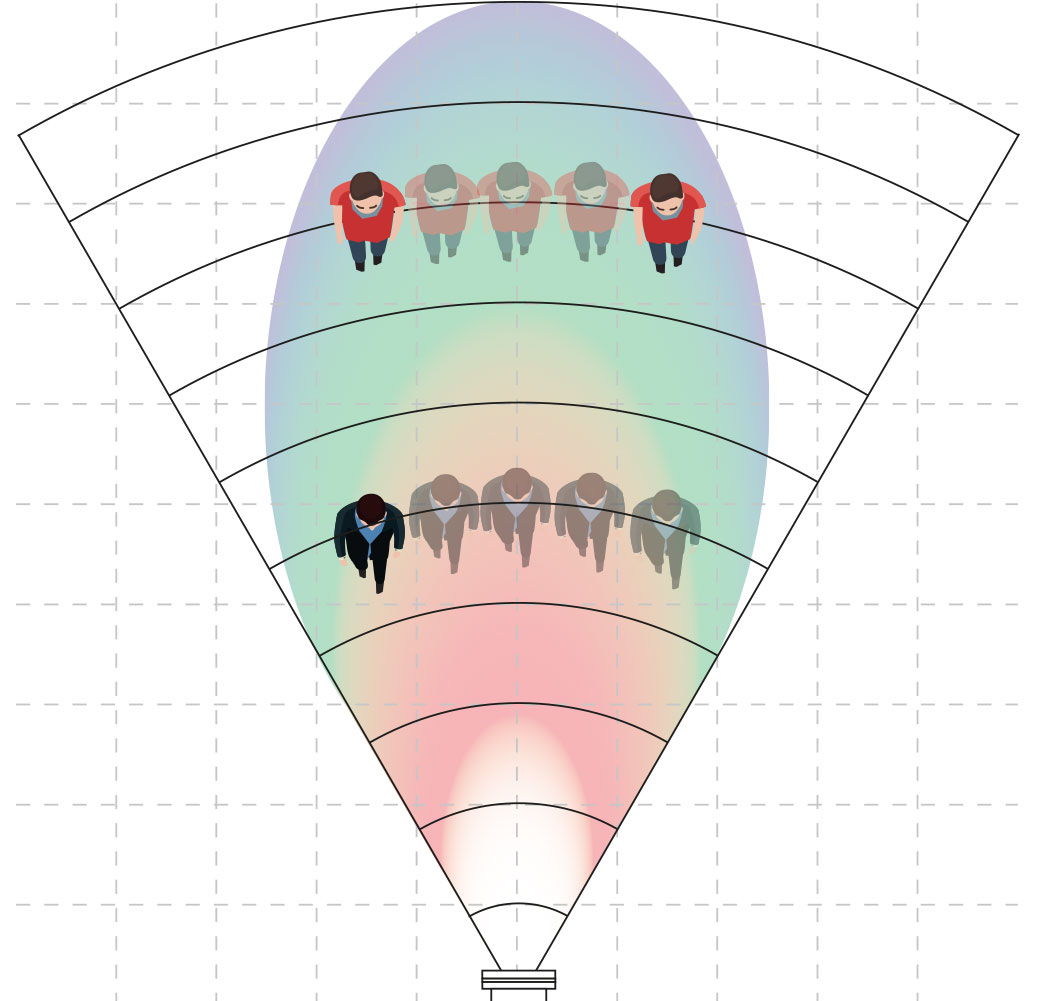
2D-RADAR (FSK)
Trennung von Objekten durch
- Geschwindigkeit & Entfernung
Objekte mit der gleichen Geschwindigkeit und Entfernung können nicht getrennt werden (Lokalisierung in einer 1-dimensionalen Umgebung möglich).
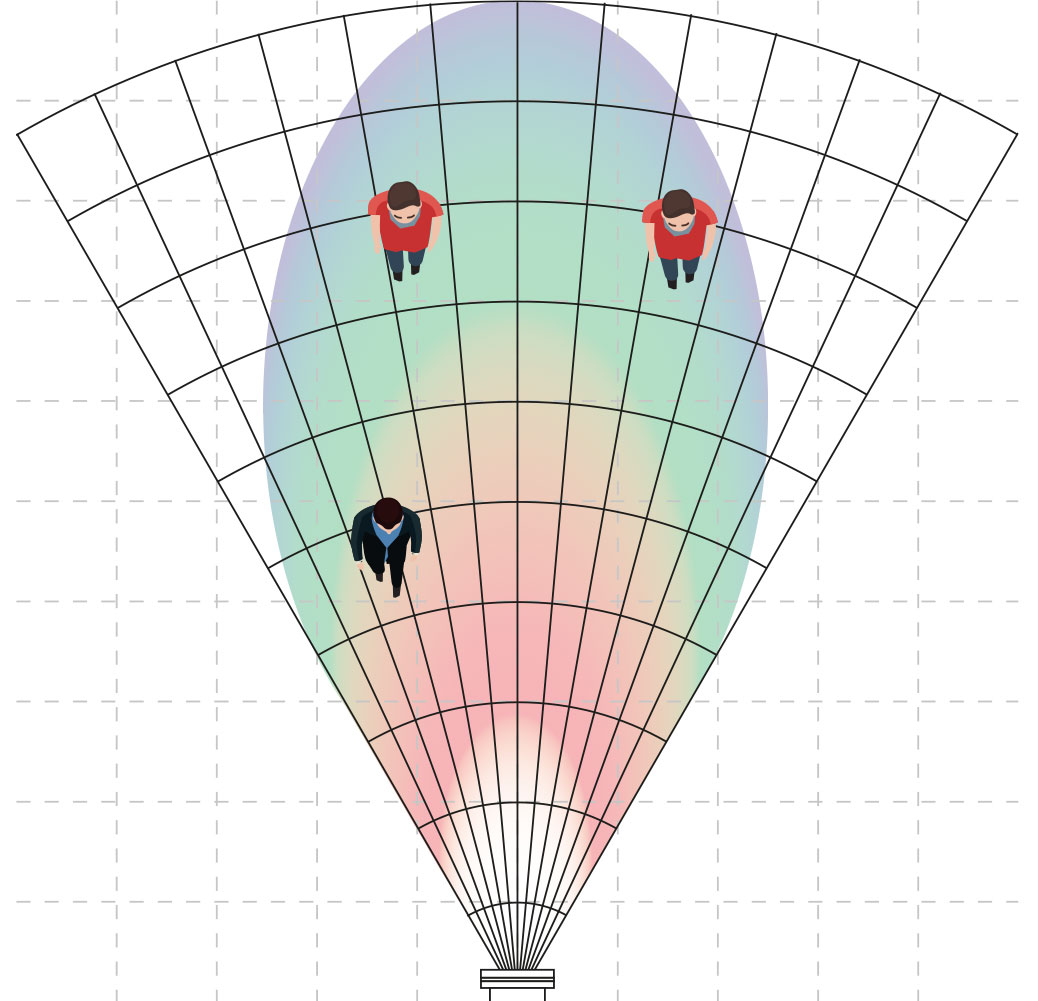
3D-RADAR (FMCW MIMO)
Trennung von Objekten durch
- Geschwindigkeit,
Entfernung & Winkel
Objekte mit der gleichen Geschwindigkeit, Entfernung & Winkel können getrennt werden (Lokalisierung in 2-dimensionalen Umgebung möglich).
4D-RADAR (FMCW MIMO)
Trennung von Objekten durch
- Geschwindigkeit,
Entfernung &
Winkelauflösung (horizontal, vertikal)
Objekte mit der gleichen Geschwindigkeit, Entfernung & Winkel können getrennt werden (Lokalisierung in einer 3-dimensionalen Umgebung möglich).
CW (continuous wave)
Radare sind in vielen Anwendungen verbreitet, in denen die Detektion einer Bewegung eine Rolle spielt. Auch FSK (frequency-shift keying) Radare trennen Objekte nur über die Geschwindigkeit, bieten aber den zusätzlichen Vorteil der Abstandsmessung.
FMCW (frequency-modulated continuous wave)
Radare kommen zum Einsatz, wenn die alleinige Messung der Geschwindigkeit nicht ausreicht. Verfügt das Radargerät nur über 1 Sende- und Empfangskanal, ist die Messung der Entfernung zum Objekt möglich, nicht aber die Messung der Winkelablage.
3D-RADAR (FMCW MIMO)
MIMO-(Multiple Input – Multiple Output) Radare verfügen über mehrere Sende- und Empfangsantennen. Jedes gesendete Signal kann von einer beliebigen Antenne empfangen werden. Die spezielle Anordnung mehrerer Antenennen verbessert das räumliche Auflösungsvermögen und reduziert die Anfälligkeit für Störungen.
4D-RADAR (FMCW MIMO)
Ein 4D-Radar hat im Vergleich zum 3D-Radar zusätzlich mehrere versetzte Antennen in der Elevation und kann so Detektionen im Höhenwinkel trennen. Damit ist eine Lokalisierung im 3D-Raum möglich.
4. Aufbau eines Radars
Ein kompletter Radarsensor besteht neben dem Frontend (Mikrowellenkomponente mit Antennenstruktur), aus Einheiten der Signalaufbereitung und der Signalverarbeitung. Gegebenenfalls sind diese elementaren Bestandteile um ein Radom, ein Gehäuse, eine Linse und einen Bauteilträger ergänzt.
Das Frontend spielt durch das Antennendesign eine zentrale Rolle, da es den Sensor an sich darstellt und die Weichen für die spätere Funktionalität festlegt. Die Signalaufbereitung und Signalverarbeitung wertet die vom Frontend gelieferten Signale aus und interpretiert sie. Dies ist notwendig, um den einzelnen, rohen Radardetektionen für den Anwender einen nachvollziehbaren Sinn durch die Zuordnung von Messeinheiten und Referenzen zu geben.

