
RADAR TECHNOLOGY
Technology trend radar
1. Radar Tutorial
Radar sensors are a key technology that is rapidly evolving. In many areas, we are benefiting from innovative sensor solutions. But what is radar and how does the technology work?
On this page, we would like to give you some insight into the world of radar sensors, explain this complex technology in greater detail, and provide some of our expertise.
1.1 What is radar?
RADAR stands for ‘Radio Detection And Ranging’ and is an active transmission and reception method in the microwave GHz range. Radar sensors are used for contactless detection, tracking, and positioning of one or more objects by means of electromagnetic waves.
1.2 How does radar detection work?
The radar antenna emits a signal in the form of radar waves, which move at the speed of light and are not perceivable by humans. When the waves hit objects, the signal changes and is reflected back to the sensor – similarly to an echo. The signal arriving at the antenna contains information about the detected object. The received signal is then processed in order to identify and position the object using the data collected. In a second step, it is possible to emit a pulse to trigger a reaction.
1.3 What are the radar technology’s characteristics?
Contactless: The radar detection measuring principle involves no contact at all. The sensor doesn’t have to have direct contact with a material or object being detected. Radar reliably measures and detects even at a long distance.
Anonymous: Radar sensors are used for industrial and automotive applications and don’t produce images. They merely form a sort of cloud of dots, which gives a rough indication of objects’ contours and the infrastructure of the surroundings. Contrary to with a camera, people are not identifiable.
Comprehensive data: Radar sensors detect movements and stationary objects. After signal processing, the data received through the reflection provides a variety of information about the detected objects, vehicles, animals, or persons. Data such as direction of movement, speed, distance, and angular position in relation to the sensor are available.
Multi-dimensional detection: Depending on its modulation, radar collects extensive data about its environment. This enables sensors to also record the environment in three dimensions, like a human eye.
Wide range variability: Radar waves spread freely in space or in the air. Depending on the sensor’s technical development and purpose, extreme ranges can be achieved if necessary. For commercial applications, the coverage range usually varies from one centimetre to a few hundred meters.
Material penetration: The electromagnetic waves of radar sensors penetrate various materials. Plastics, in particular, are very well-suited for covering or designing a radome – a dome-shaped protective casing for the antenna. It allows the sensors to be integrated discreetly into a product design.



1.4 What are the advantages of radar technology?
Based on radar’s properties, the technology offers certain advantages for its respective application.
Because radar
- is independent from weather conditions
- tolerates extreme heat and cold
- works even despite overexposure and bad lighting conditions
- works in the dark
- is maintenance-free
- offers a great range of functions,
for example measurement of distance & speed, tracking, positioning of objects, determination of ETA, object classification, people count - is suitable for indoor & outdoor use
- can be used for many applications
InnoSenT’s radar products also boast a compact design and easy integration.
1.5 What makes radar different from other sensor technologies?
The different measuring methods have different strengths and weaknesses. Depending on the application, users must consider which sensor technology offers the greatest added value and manages the respective tasks and challenges. The following table provides a rough overview:
| PERFORMANCE LEVEL | ||||
|---|---|---|---|---|
| FEATURES | RADAR | INFRARED | ULTRASONIC | LASER |
| Application flexibility | BEST | BAD | BAD | BAD |
| Resistance to moisture, dirt and temperature | BEST | BAD | BAD | BAD |
| Speed detection | BEST | BAD | GOOD | BEST |
| Accuracy sensitivity | BEST | BAD | BEST | BEST |
| Resolution (separability) | BEST | BAD | BEST | BEST |
| Direction capability | BEST | GOOD | GOOD | BAD |
| Distance measurement | BEST | GOOD | BAD | BEST |
| Penetration of materials | BEST | BAD | BAD | BAD |
| Size of solutions | BEST | BEST | BEST | BAD |
| Cost | GOOD | BEST | BEST | BAD |
2. Parameters of radar technology
Not all radar is the same. The sensors often differ in terms of functions and properties. This is because, depending on the application, different configurations are required to conduct the desired measurement. The differences between different radar types are defined via two basic parameters: the frequency band used and the modulation.
The radar measurement method transmits and receives electromagnetic waves within a specific frequency range. Due to varying physical properties, the range of radar sensors is divided up between different gradations. And certain frequency ranges are labelled with letters designating the frequency band. This name is defined by institutions such as the IEEE and NATO and is internationally recognised.
Technical communication by means of radar waves is generally regulated by national authorities and international associations. They define power limits and the approval of the frequency bands.
The typical spectrum for commercial radar applications is between 10 and 120 GHz. Depending on the application, developers use different operating ranges due to their respective technical characteristics. The choice of the transmission and reception frequency also affects radar’s achievable performance and characteristics.
For example, 10 GHz radars even penetrate walls, while sensors in the 60 GHz or 77 GHz range support a higher resolution due to the higher permitted bandwidth. An advantage of 24 GHz sensors is their ability to be approved worldwide.
Often, the radar type is also defined through indication of the radar method used. The radar signal is influenced through selective modulation of the transmission frequency. The common radar types are CW, FSK, and FMCW.
CW stands for ‘continuous wave’. In this method, the sensor transmits and receives the signal simultaneously and continuously (fixed transmission frequency). This type is also known as an unmodulated continuous-wave radar.
FSK means ‘frequency-shift keying’. This is a special type of FMCW radar that jumps alternately between two frequencies.
FMCW is the abbreviation for ‘frequency-modulated continuous wave’. Frequency-modulated continuous wave radars don’t use a fixed transmission frequency, but rather a time-dependent, varying modulation of the frequency (steady, cyclic, and curved), also called a chirp.
When do I need which radar type? This depends on the object to be detected and the required object information.
The following table gives you a rough overview to make an initial preliminary selection:
3. Possibilities of radar technology
Radar detection can be used to detect the presence or movement of objects or living beings. Depending on the modulation and antenna configuration, it may be possible to attain the following information:
SPEED
Exact data about the speed of an objectDISTANCE
Data about the distance of one or more objectsDIRECTION OF MOVEMENT
An object’s direction of movementANGLE
Determination of the angle of incidence and resolution via the angular resolution
Through analogue and digital signal analysis, further information can also be derived from these base values. For example, intelligent algorithms can be used to create radar clusters, which then map the motion history. And it is also possible to classify these objects. Based on the signal analysis, the radar uses the raw data, such as the radar cross-section (RCS), to detect whether a given object is a person or a vehicle. If there are reference values available, this enables limit values, filling quantities, or arrival times to also be determined.
There are frequently misunderstandings here in connection with the radar solution. While the resolution describes a radar’s ability to distinguish objects, its accuracy refers to the smallest measurable difference in the measured variable. It describes how precisely parameters such as speed, distance, or angular position are measured. This is done while taking into account a plus/minus tolerance, indicated as the deviation rate.
Measurement accuracy depends on the timeframe in which the measurement is taken. The longer the object detection, the more readings the radar receives. The more data is available to be analysed, the more meaningful and reliable the detection is.
In practice, developers usually have to compromise between detection time and accuracy. Because if information is meant to be available as quickly as possible, the measuring time must be shortened.
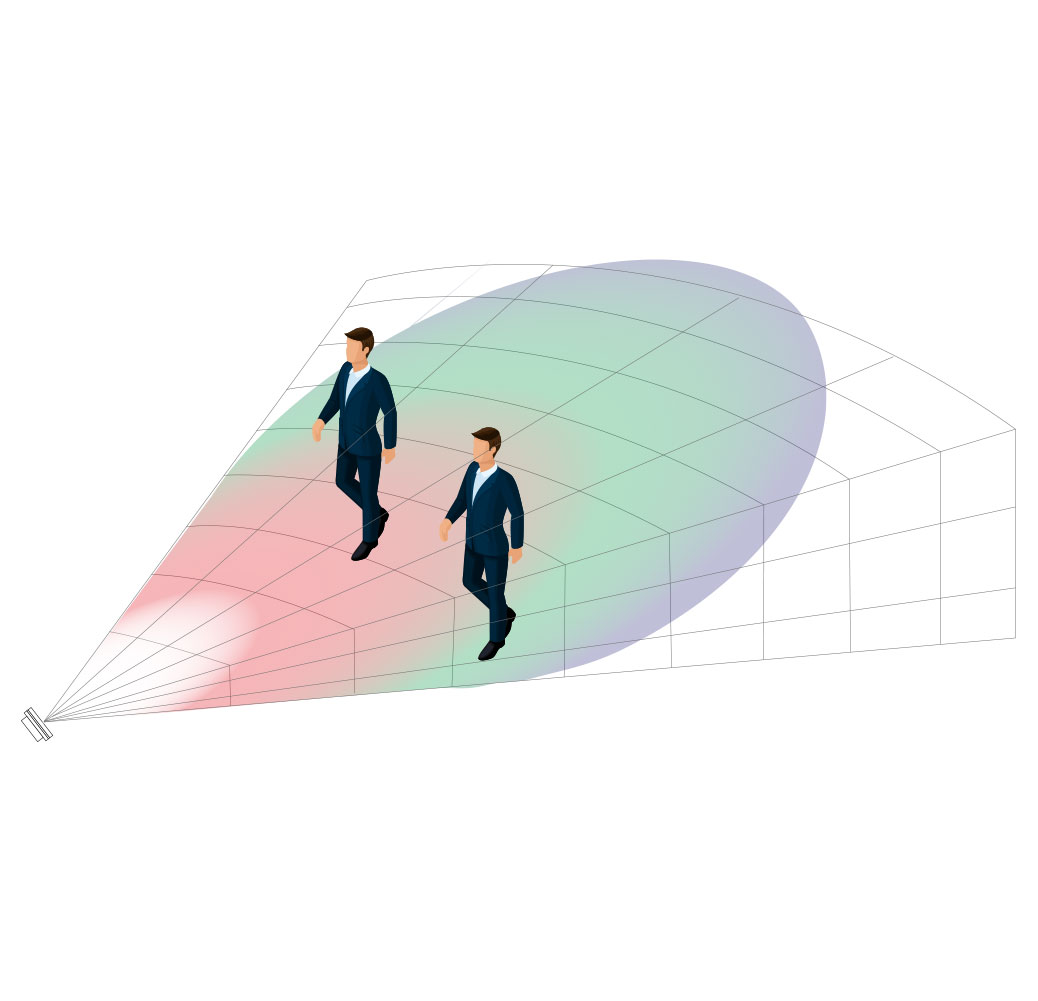
Through the antenna design, the radar developers define the sensor’s coverage range. By varying the arrangement of the antenna, this orients the emission of the radar waves. The antenna diagram shows in what direction the antenna emits the most energy. Employing directional antennas, the developers design the form and range such that as much antenna gain as possible can be achieved. This enables the energy to be focused on the desired angle of vision and reduces energy waste and side lobes.
The detection area can be focused narrowly and elongated, yet still be wide too. The design depends on the subsequent application. A new method lies in advanced MIMO technology, which combines the use of several transmitting and receiving antennas.
Radar waves spread freely in space in the air. When they hit an object, the signal is influenced by the object’s composition. And different materials have different impacts on the radar waves. They are either completely or partially absorbed or reflected. The radar beams also penetrate different substances.
The following statements can generally be made regarding 24 GHz radars:
| MATERIAL | ABSORPTION | REFLECTION | WAVE |
|---|---|---|---|
| Metal | None | Straight-on incidence: complete; Diagonal angle of incidence: Refraction and partial reflection possible | Virtually impossible, only millimetre fractions penetrate into the surface (skin effect) |
| Wood (depending on humidity) | Medium to high | Low | Low |
| Water | Very high | Depending on the angle of incidence: Partial or complete reflection possible | None, due to absorption |
| Foams (e.g. polystyrene, Roofmate) | Low | None | Very good |
| Plastics | Low to high (depending on material and thickness) | Low to high (depending on material, thickness, and distance) | Low to high (depending on material, thickness, and distance) |
The ranges of radar products can vary widely. In the industrial, commercial, and automotive sectors, they may take measurements at a distance of a few centimetres to several hundred or thousand metres. How far a radar can measure depends on various factors.
In general, the further away an object is, the more difficult it is to detect. Objects with low RCS (radar cross section) are also more difficult to detect at a distance. After all, the signal has to travel a long communication path back and forth. This causes signal losses, for example due to environmental influences or interfering factors. The higher the transmission and reception power, the better the signal is after travelling a long reflection path.
The radar range is always limited by the selected frequency band, which determines the available wavelength and its frequency, and the transmission power is also restricted by regulations. At the same time, the reception power is defined by the antenna gain and the antenna design. Through the design of the antenna’s directivity (e.g. strong focusing) and the integration of several antennas, developers achieve a high sensitivity. However, this leads to greater noise, which must be suppressed through further technical work.
In radar development, an optimum ratio between range, coverage area, and resolution must be achieved for the respective application and technical work must be performed to minimise undesirable side effects.
One advanced feature of radar products is object classification, which requires extensive information about an object to be available. This can be achieved through a high resolution, since more measuring points of an object can then be detected. The classification is then performed using intelligent algorithms for signal processing. For example, in traffic-related applications, it is possible to identify the object as a specific vehicle class based on the length of the vehicle (how far the object extends in space).
However, measurements such as the RCS, speed, or information about motion patterns also help in assigning objects to a specific type. For example, a person has a different RCS value than a vehicle. Using the available data and appropriate programming, statements can be made about the object’s classification, for instance in terms of the categories of ‘person, vehicle, animal, or other’.
3.7 Resolution
The radar resolution is the ability of radar sensors and systems to distinguish targets from each other (differentiability). The following overview shows the different radar solutions.
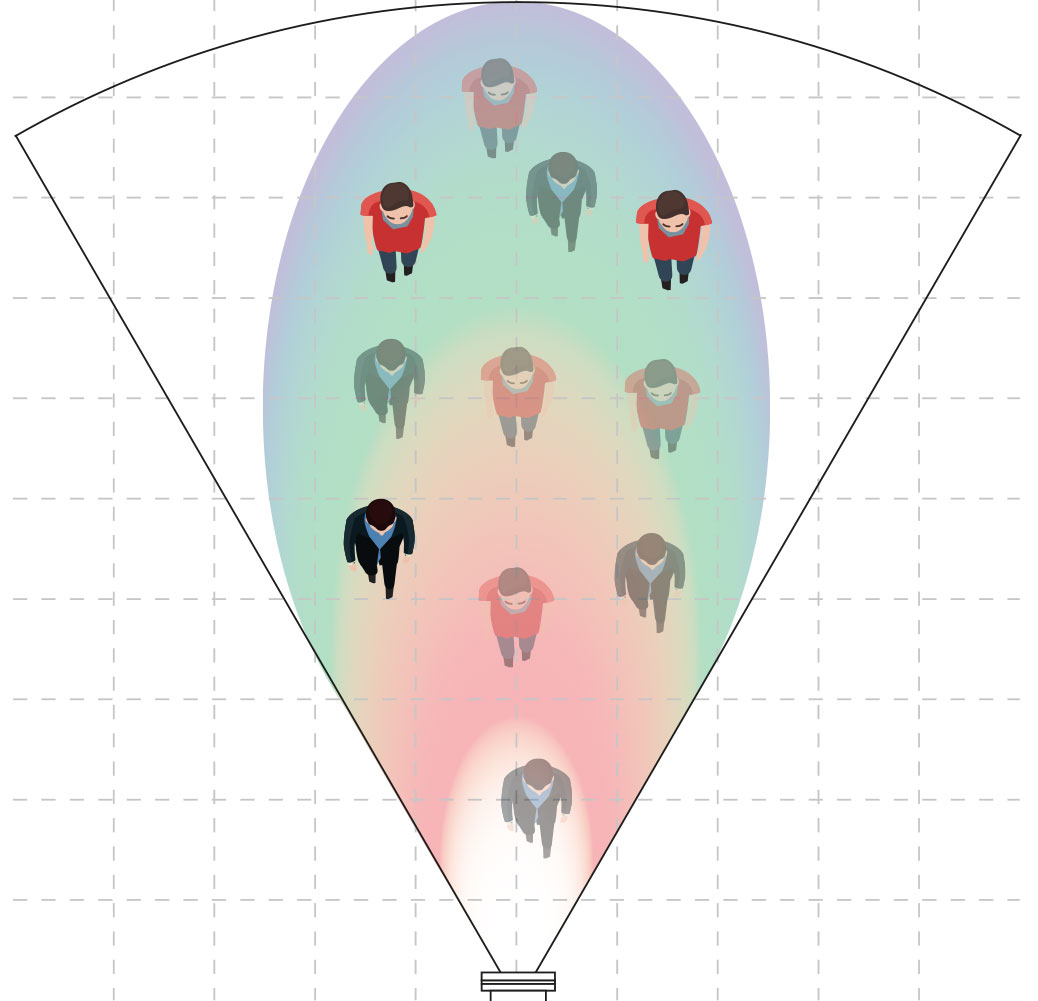
1D-RADAR (CW)
Object seperation via
Velocity
No seperation of objects with same speed. (Object location is not possible).
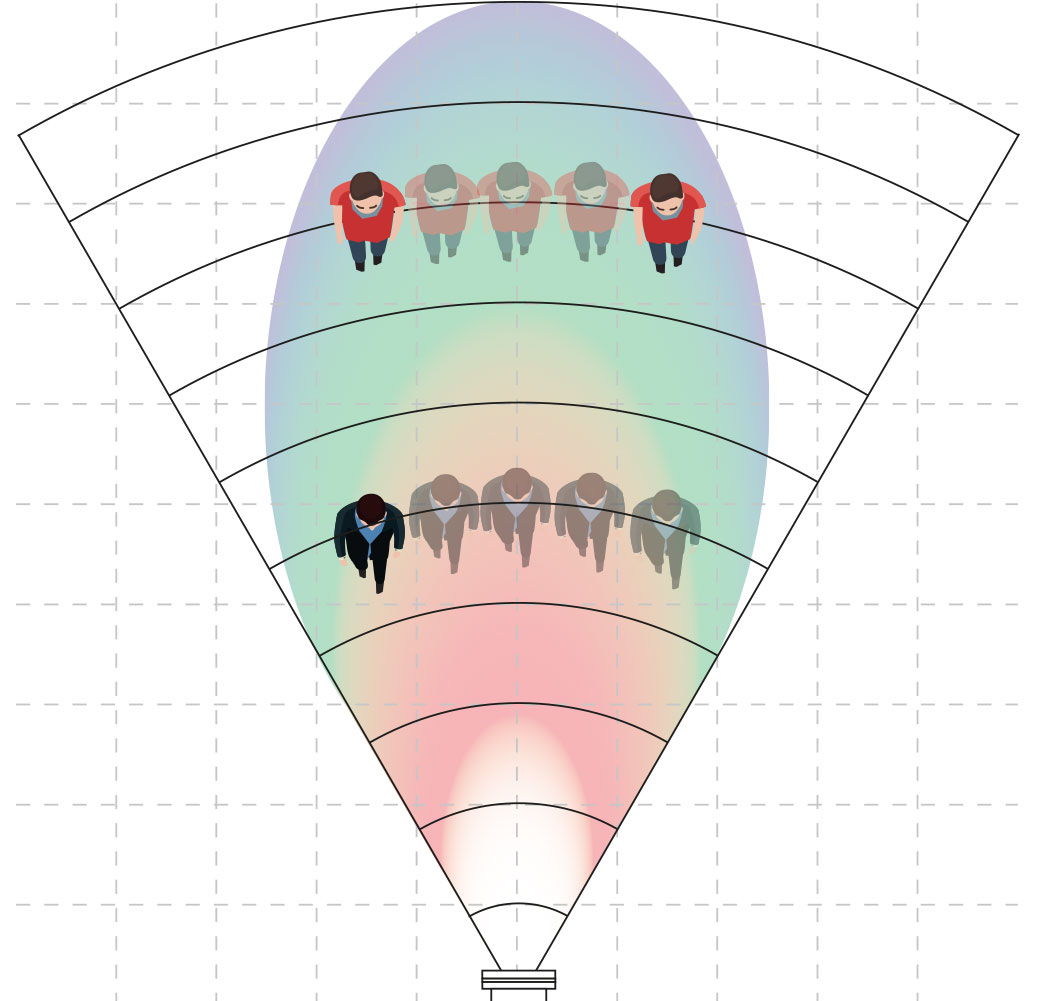
2D-RADAR (FSK)
Object seperation via
- Velocity & Distance
No separation of objects with same speed and distance. (Locating of objects in one-dimensional environment, no angle information).
.
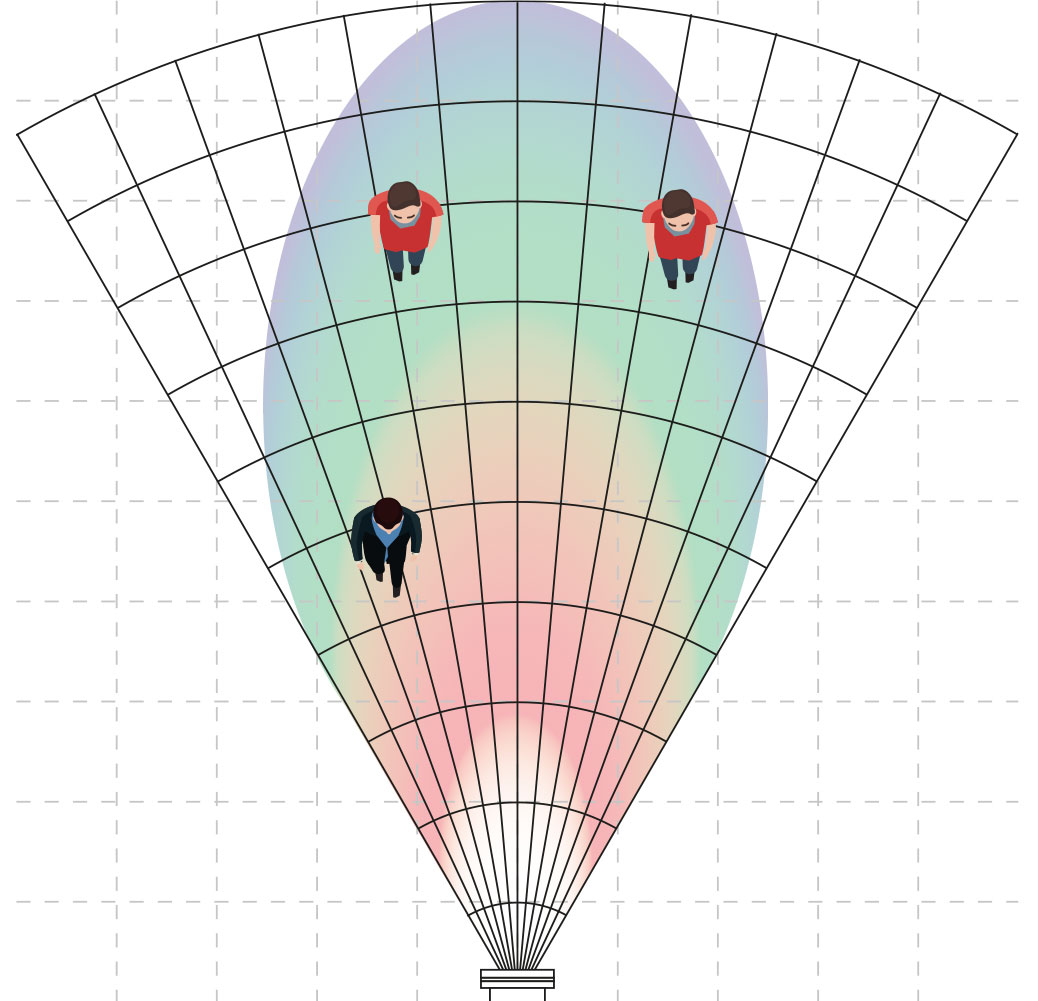
3D-RADAR (FMCW MIMO)
Object seperation via
- Velocity, Distance & Angle
Objects with same speed, distance and angle position can be separated. (Locating of objects in a two-dimensional environment possible).
4D-RADAR (FMCW MIMO)
Object seperation via
- Velocity, Distance & Angle (horizontal, vertikal)
Objects with same speed, distance and angle position can be separated. (Locating of objects in a three-dimensional environment possible).
CW (continuous wave)
radars are widely used in many applications of motion detection. FSK (frequency-shift keying) radars also only separate objects according to their speed, but also offers the advantage of distance measurement.
FMCW (frequency-modulated continuous wave)
radars are used when measuring the speed alone is not sufficient. If the radar device only has 1 transmission and receiver channel, the distance to the object can be measured, but the angular offset cannot be measured.
3D-RADAR (FMCW MIMO)
radars have several transmitting and receiving antennas. Every transmitted signal can be received by any antenna. The special arrangement of multiple antennas improves the spatial resolution and reduces susceptibility to interference.
4D-RADAR (FMCW MIMO)
Compared to 3D radar, a 4D radar also has several offset antennas in the elevation and can thus separate detections in the elevation angle. This enables localization in a 3D environment.
4. Structure of a radar
In addition to its front end (microwave component with antenna structure), a complete radar sensor consists of units for signal conditioning and signal processing. These elementary components may also be supplemented with a radome, housing, lens, and a component carrier.
Through the antenna design, the front end plays a key role, as it comprises the sensor in itself and sets the parameters for subsequent functions. Signal conditioning and processing analyse and interpret the signals provided by the front end. This is necessary in order to give the individual, raw radar detections a comprehensible meaning for users through the assignment of units of measure and references.

